O tipo mais famoso de equipamento de exploração magnética é magnetômetro. Sua versão modificada é gradiômetro. Os princípios de medição do campo magnético nesses dispositivos são os mesmos - podem ser prótons, fluxgate, quânticos, etc., apenas as soluções construtivas são diferentes, o que permite resolver problemas um pouco diferentes.
Figura 1. Campo magnético tridimensional da cidade antiga.
Considere os tipos de magnetômetros mais usados. Em primeiro lugar, é claro, estes são magnetômetros de prótons, fluxgate e quânticos. Todos eles têm certas vantagens e desvantagens. Claro, também existem magnetômetros criogênicos, magnetômetros de efeito Hall e magnetômetros de indução. Mas os magnetômetros pedestres de interesse para a pesquisa arqueológica são, obviamente, prótons, fluxgate e, em menor grau, quânticos. Considere suas características comparativas.
Parece que a principal característica de um magnetômetro é sua sensibilidade. No entanto, isso não é bem verdade. Por exemplo, magnetômetros criogênicos eles atingem facilmente uma sensibilidade de 0,0001 nT, mas são tão inconvenientes, volumosos e caprichosos que não são usados mesmo na versão aerodinâmica (embora tenha havido tentativas).
Magnetômetros quânticos também são bastante capazes de mostrar uma precisão de 0,01 nT, mas têm restrições muito rígidas na orientação dos sensores. Eles têm sido usados com sucesso por muitos anos em levantamentos aeromagnéticos.
Magnetômetros Ferroprobe, tendo uma precisão de medição muito alta e a capacidade de produzir não discretos, como magnetômetros quânticos e de prótons, mas um sinal contínuo, são sensíveis a mudanças de temperatura, o que dá aos projetistas alguns problemas com o "zero fluência" do dispositivo.
Magnetômetros de prótons, sendo menos sensível, mostrou-se muito bom em termos de estabilidade, baixa suscetibilidade a mudanças de temperatura e orientação para os pontos cardeais (embora este último ainda esteja presente). As desvantagens dos sensores de prótons incluem a discrição das medições, que requer uma parada em cada ponto, o volume e peso dos sensores, bem como a impossibilidade de medições em campos fortes.
Mais sobre sensibilidade. Se você vir uma sensibilidade de 0,1 nT no passaporte do dispositivo, isso não significa que você poderá detectar uma anomalia de pelo menos 1 nT! Em primeiro lugar, este 0,1 nT é sobreposto pelo desvio de temperatura do zero do dispositivo (vários nT). Em segundo lugar, a influência da orientação espacial do dispositivo é de outros 2-4 nT. Bem, e, claro, variações do campo geomagnético já familiares para nós.
Em uma palavra, como mostra a prática de longo prazo, é impossível isolar uma anomalia com uma amplitude inferior a 3-7 nT durante um levantamento de pedestres de área padrão. No disparo de rotas (quando o mecanismo de busca segue uma determinada rota, geralmente em terrenos acidentados), tentando isolar a anomalia de acordo com as leituras atuais do dispositivo, é muito difícil detectar uma anomalia mesmo em 10-20 nT. Assim, ao pesquisar, você pode alternar com segurança a sensibilidade do seu dispositivo de 0,1 para 1 nT e começar a trabalhar sem se cansar olhando os décimos na tela.
Outra característica importante do magnetômetro é o método de registro. Se a informação for exibida apenas no placar em formato digital e (ou) em mídia magnética, então, é claro, este é um dispositivo projetado para levantamento de área. Essas obras são bastante complexas, demandam custos de material e tempo, e o resultado, apresentado na forma de mapas do campo magnético do local, é emitido somente após determinado tempo.
O dispositivo de busca deve ter uma luz (escala variável) e indicação sonora. Isso permite que você rapidamente, no decorrer da pesquisa de campo, veja a anomalia, encontre seu centro e tome imediatamente uma decisão sobre suas perspectivas. O dispositivo de busca mais comum é um detector de metais portátil, mas sua profundidade deixa muito a desejar, embora outras características (discriminação, precisão de detecção de alvos, etc.) sejam levadas a um alto nível pelos fabricantes.
Os requisitos de um dispositivo de pesquisa profunda mais poderoso são atendidos magnetômetros-gradientômetros. Sendo, de fato, dois magnetômetros combinados em um único dispositivo, o gradiômetro dá ao proprietário informações não sobre o valor numérico do campo no ponto de medição, mas sobre a diferença do campo entre dois pontos no espaço - sobre o gradiente. Uma vez que o gradiente do campo da Terra, estruturas geológicas e variações temporais é muito pequeno, ele é ignorado pelo gradiômetro. Mas o gradiente dos resultados da atividade humana, ao contrário, é grande. O campo de pequenos objetos da atividade humana é pequeno, mas decai tão rapidamente que essa atenuação (gradiente) é facilmente registrada por um gradiômetro sem mapeamento preliminar do campo magnético. Um magnetômetro comum também captará essa diferença, mas para isso o operador terá que fazer não uma, mas duas medições em cada ponto - abaixo, no nível do solo e 1-2 metros acima, o que, obviamente, é inconveniente. Mas para a medição correta do campo com um magnetômetro, é necessário parar em cada ponto, e isso é duplamente inconveniente.
O magnetômetro diferencial trazido à sua atenção pode ser muito útil para procurar grandes objetos de ferro. É praticamente impossível procurar tesouros com esse dispositivo, mas é indispensável ao procurar tanques, navios e outros tipos de equipamentos militares afundados.
O princípio de funcionamento de um magnetômetro diferencial é muito simples. Qualquer objeto ferromagnético distorce o campo magnético natural da Terra. Esses itens incluem tudo feito de ferro, ferro fundido e aço. A magnetização intrínseca dos objetos, que ocorre com frequência, também pode afetar significativamente a distorção do campo magnético. Tendo corrigido o desvio da força do campo magnético do valor de fundo, podemos concluir que há um objeto feito de material ferromagnético próximo ao dispositivo de medição.
A distorção do campo magnético da Terra longe do alvo é pequena, e é estimada a partir da diferença de sinais de dois sensores separados por alguma distância. Portanto, o dispositivo é chamado de diferencial. Cada sensor mede um sinal proporcional à força do campo magnético. Sensores ferromagnéticos e sensores baseados na precessão magnetônica de prótons são os mais utilizados. O dispositivo em consideração usa sensores do primeiro tipo.
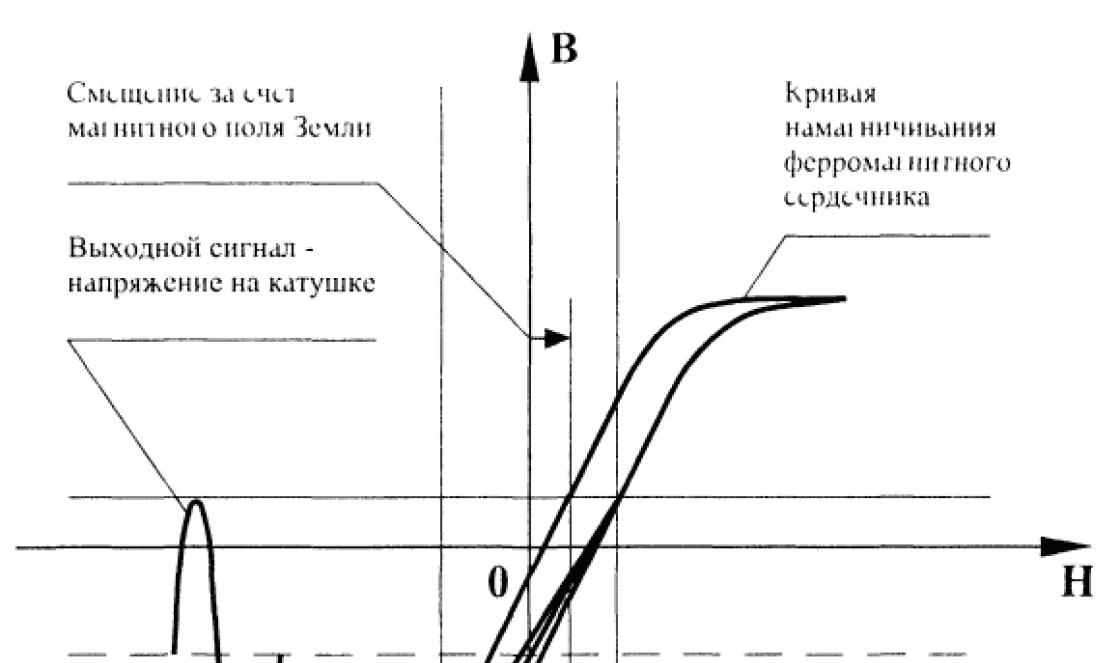
A base de um sensor ferromagnético (também chamado de fluxgate) é uma bobina com um núcleo de material ferromagnético. Uma curva de magnetização típica para tal material é bem conhecida de um curso de física escolar e, levando em conta a influência do campo magnético da Terra, tem a seguinte forma, mostrada na Fig. 29.

Arroz. 29. Curva de magnetização
A bobina é excitada por um sinal senoidal alternado da frequência portadora. Como pode ser visto a partir da fig. 29, o deslocamento da curva de magnetização do núcleo ferromagnético da bobina pelo campo magnético externo da Terra leva ao fato de que a indução do campo e a tensão associada na bobina começam a se distorcer de maneira assimétrica. Em outras palavras, a tensão do sensor com uma corrente senoidal da frequência portadora diferirá da senóide por topos mais "achatados" das meias-ondas. E essas distorções serão assimétricas. Na linguagem da análise espectral, isso significa o aparecimento no espectro da tensão de saída da bobina de harmônicos pares, cuja amplitude é proporcional à força do campo magnético de polarização (campo da Terra). São esses harmônicos pares que devem ser "capturados".

Arroz. 30. Sensor ferromagnético diferencial
Antes de mencionar o detector síncrono que naturalmente se propõe para este fim, operando com um sinal de referência de frequência de dupla portadora, consideremos o projeto de uma versão complicada de um sensor ferromagnético. É composto por dois núcleos e três bobinas (Fig. 30). Em sua essência, é um sensor diferencial. Porém, para simplificar, mais adiante no texto não o chamaremos de diferencial, pois o próprio magnetômetro já é diferencial :).
O projeto consiste em dois núcleos ferromagnéticos idênticos com bobinas idênticas colocadas em paralelo uma ao lado da outra. Em relação ao sinal elétrico excitatório da frequência de referência, eles são incluídos na direção oposta. A terceira bobina é um enrolamento enrolado no topo das duas primeiras bobinas de núcleo empilhadas juntas. Na ausência de um campo magnético de polarização externa, os sinais elétricos do primeiro e segundo enrolamentos são simétricos e idealmente atuam de modo que não haja sinal de saída no terceiro enrolamento, pois os fluxos magnéticos através dele são completamente cancelados.
Na presença de um campo magnético de polarização externa, a imagem muda. Um ou outro núcleo no pico da meia onda correspondente "voa" para uma saturação mais profunda do que o normal devido à influência adicional do campo magnético da Terra. Como resultado, um sinal de incompatibilidade de frequência dupla aparece na saída do terceiro enrolamento. Os sinais harmônicos fundamentais são idealmente totalmente compensados lá.
A conveniência do sensor considerado reside no fato de que suas bobinas podem ser incluídas para aumentar a sensibilidade em circuitos oscilatórios. O primeiro e o segundo - no circuito oscilatório (ou circuito), sintonizado na frequência da portadora. O terceiro - em um circuito oscilatório sintonizado no segundo harmônico.
O sensor descrito tem um padrão de radiação pronunciado. Seu sinal de saída é máximo quando o eixo longitudinal do sensor está localizado ao longo das linhas de força do campo magnético externo constante. Quando o eixo longitudinal é perpendicular às linhas de força, o sinal de saída é zero.
O sensor do tipo considerado, especialmente em combinação com um detector síncrono, pode funcionar com sucesso como uma bússola eletrônica. Seu sinal de saída após a retificação é proporcional à projeção do vetor de força do campo magnético da Terra no eixo do sensor. A detecção síncrona também permite descobrir o sinal dessa projeção. Mas mesmo sem um sinal - orientando o sensor no mínimo do sinal, obtemos a direção para oeste ou leste. Orientando ao máximo - obtemos a direção da linha do campo magnético do campo da Terra. Em latitudes médias (por exemplo, em Moscou), ele vai obliquamente e "gruda" no solo na direção do norte. De acordo com o ângulo de declinação magnética, pode-se estimar aproximadamente a latitude geográfica da área.
Os magnetômetros ferromagnéticos diferenciais têm suas vantagens e desvantagens. As vantagens incluem a simplicidade do dispositivo, não é mais complicado do que um receptor de rádio de amplificação direta. As desvantagens incluem a complexidade dos sensores de fabricação - além da precisão, é necessária uma correspondência absolutamente exata do número de voltas dos enrolamentos correspondentes. Um erro de uma ou duas voltas pode reduzir bastante a sensibilidade possível. Outra desvantagem é a “bússola” do dispositivo, ou seja, a impossibilidade de compensação completa do campo da Terra subtraindo sinais de dois sensores espaçados. Na prática, isso leva a sinais falsos quando o sensor é girado em torno de um eixo perpendicular ao longitudinal.
Projeto prático
O projeto prático de um magnetômetro ferromagnético diferencial foi implementado e testado em uma versão protótipo sem uma parte eletrônica especial para indicação sonora, utilizando apenas um microamperímetro com zero no meio da escala. O esquema de indicação de som pode ser obtido da descrição do detector de metais de acordo com o princípio "transmissão-recepção". O dispositivo tem os seguintes parâmetros.
Principais características técnicas
- Tensão de alimentação - 15... 18 V
- Consumo de corrente - não mais que 50 mA
Profundidade de detecção:
- pistola - 2 m
- cano de canhão - 4 m
- tanque - 6 m
Esquema estrutural
O diagrama de blocos é mostrado na fig. 31. Um oscilador mestre estabilizado por quartzo fornece uma freqüência de clock para o condicionador de sinal.

Arroz. 31. Diagrama estrutural de um magnetômetro ferromagnético diferencial
Em uma de suas saídas, há uma onda quadrada do primeiro harmônico, que entra no amplificador de potência, que excita as bobinas radiantes dos sensores 1 e 2. A outra saída forma uma onda quadrada da frequência de clock duplo de referência com um deslocamento de 90 ° para o detector síncrono. O sinal de diferença dos enrolamentos de saída (terceiros) dos sensores é amplificado no amplificador receptor e retificado por um detector síncrono. Um sinal constante retificado pode ser registrado com um microamperímetro ou dispositivos de indicação sonora descritos nos capítulos anteriores.
diagrama de circuito
O diagrama esquemático de um magnetômetro ferromagnético diferencial é mostrado na fig. 32 - parte 1: oscilador mestre, condicionador de sinal, amplificador de potência e bobinas radiantes, fig. 33 - parte 2: bobinas receptoras, amplificador receptor, detector síncrono, indicador e fonte de alimentação.

Arroz. 32. Diagrama esquemático - parte 1
O oscilador mestre é montado nos inversores D1.1-D1.3. A frequência do oscilador é estabilizada por um ressonador Q de quartzo ou piezocerâmico com uma frequência ressonante de 215 Hz = 32 kHz ("quartzo relógio"). O circuito R1C1 evita a excitação do gerador em harmônicos mais altos. Através do resistor R2, o circuito OOS é fechado, através do ressonador Q, o circuito POS é fechado. O gerador é caracterizado pela simplicidade, baixo consumo de corrente, operação confiável em uma tensão de alimentação de 3 ... 15 V, não contém elementos sintonizados e resistores de alta resistência. A frequência de saída do gerador é de cerca de 32 kHz.
Condicionador de sinal(Fig. 32)
O condicionador de sinal é montado em um contador binário D2 e um D-trigger D3.1. O tipo de contador binário não é fundamental, sua principal tarefa é dividir a frequência do clock por 2, por 4 e por 8, obtendo assim meandros com frequências de 16, 8 e 4 kHz, respectivamente. A frequência portadora para excitação das bobinas radiantes é de 4 kHz. Sinais com frequências de 16 e 8 kHz, atuando no D-flip-flop D3.1, formam em sua saída um meandro dobrado em relação à frequência da portadora de 8 kHz, deslocado em 90° em relação ao sinal de saída do 8 kHz contador binário kHz. Tal deslocamento é necessário para a operação normal do detector síncrono, uma vez que o mesmo deslocamento possui um sinal útil de descasamento de frequência dupla na saída do sensor. A segunda metade do microcircuito de dois flip-flops D - D3.2 não é usada no circuito, mas suas entradas não utilizadas devem ser conectadas à lógica 1 ou lógica 0 para operação normal, mostrada no diagrama.
Amplificador(Fig. 32)
O amplificador de potência não se parece com isso e são apenas poderosos inversores D1.4 e D1.5, que em antifase oscilam um circuito oscilatório composto por bobinas radiantes conectadas em série-paralelo do sensor e do capacitor C2. Um asterisco próximo ao valor do capacitor significa que seu valor é indicado aproximadamente e que deve ser selecionado durante o comissionamento. Um inversor D1.6 não utilizado, para não deixar sua entrada desconectada, inverte o sinal D1.5, mas fica praticamente "inativo". Os resistores R3 e R4 limitam a corrente de saída dos inversores a um nível aceitável e, juntamente com o circuito oscilatório, formam um filtro passa-banda de alta qualidade, devido ao qual a forma da tensão e da corrente nas bobinas radiantes do sensor quase coincide com uma sinusoidal.
Amplificador de recepção(Fig. 33)
O amplificador receptor amplifica o sinal de diferença proveniente das bobinas receptoras do sensor, que junto com o capacitor C3 formam um circuito oscilatório sintonizado em uma frequência dupla de 8 kHz. Graças ao resistor de sintonia R5, os sinais das bobinas receptoras são subtraídos com alguns coeficientes de ponderação, que podem ser alterados movendo o controle deslizante do resistor R5. Isso obtém compensação para parâmetros não idênticos dos enrolamentos de recepção do sensor e minimização de sua "bússola".
O amplificador receptor é de dois estágios. Ele é montado nos amplificadores operacionais D4.2 e D6.1 com um sistema operacional de tensão paralela. O capacitor C4 reduz o ganho em frequências mais altas, evitando assim a sobrecarga do caminho de amplificação com captadores de alta frequência de redes de energia e outras fontes. Os circuitos de correção de amplificador operacional são padrão.
Detector síncrono(Fig. 33)
O detector síncrono é feito no OS D6.2 de acordo com um esquema típico. O chip D5 CMOS 8 por 1 multiplexador-desmultiplexador é usado como chaves analógicas (Fig. 32). Seu sinal de endereço digital é movido apenas no bit menos significativo, proporcionando comutação alternada dos pontos K1 e K2 para um barramento comum. O sinal retificado é filtrado pelo capacitor C8 e amplificado pelo amplificador operacional D6.2 com atenuação adicional simultânea de componentes de RF não filtrados pelos circuitos R14C11 e R13C9. O circuito de correção do amplificador operacional é padrão para o tipo usado.

Arroz. 33. Diagrama esquemático - parte 2. Amplificador receptor
Indicador(Fig. 33)
O indicador é um microamperímetro com zero no meio da escala. Na parte do indicador, os circuitos de outros tipos de detectores de metal descritos anteriormente podem ser usados com sucesso. Em particular, como indicador, você pode usar o projeto de um detector de metais baseado no princípio de um medidor de frequência eletrônico. Neste caso, seu oscilador LC é substituído por um oscilador RC, e a tensão de saída medida é alimentada através de um divisor resistivo para o circuito de ajuste de frequência do temporizador. Você pode ler mais sobre isso no site de Yuri Kolokolov.
O chip D7 estabiliza a tensão de alimentação unipolar. O amplificador operacional D4.1 cria um ponto de alimentação intermediário artificial, permitindo o uso de circuitos convencionais de amplificador operacional bipolar. Os capacitores de bloqueio cerâmicos C18-C21 são montados próximos às carcaças dos circuitos digitais D1, D2, D3, D5.
Tipos de peças e design
Os tipos de microcircuitos utilizados estão indicados na Tabela. 6.
Tabela 6. Tipos de microcircuitos utilizados

Em vez de microcircuitos da série K561, é possível usar microcircuitos da série K1561. Você pode tentar usar alguns chips da série K176 ou análogos estrangeiros das séries 40XX e 40XXX.
Os amplificadores operacionais duplos (amp-op) da série K157 podem ser substituídos por quaisquer amplificadores operacionais de uso geral de parâmetros semelhantes (com alterações correspondentes nos circuitos de pinagem e correção).
Não há requisitos especiais para os resistores usados no circuito do magnetômetro diferencial. Eles só precisam ser robustos e em miniatura em design e fáceis de instalar. A taxa de dissipação de energia é de 0,125 ... 0,25 W.
Os potenciômetros R5, R16 são multi-voltas desejáveis para a conveniência de ajustar o dispositivo. A alça do potenciômetro R5 deve ser de plástico e ter comprimento suficiente para que o toque da mão do operador durante o ajuste não provoque alterações nas leituras do indicador devido a pickups.
Capacitor C16 - eletrolítico de qualquer tipo de pequeno porte.
Os capacitores dos circuitos oscilatórios C2 * e C3 * consistem em vários (5-10 pcs.) Capacitores conectados em paralelo. O ajuste do circuito em ressonância é realizado selecionando o número de capacitores e sua classificação. O tipo recomendado de capacitores é K10-43, K71-7 ou análogos termoestáveis estrangeiros. Você pode tentar usar capacitores convencionais de filme cerâmico ou metálico, porém, com flutuações de temperatura, você terá que ajustar o dispositivo com mais frequência.
Microamperímetro - qualquer tipo para uma corrente de 100 μA com zero no meio da escala. Microamperímetros de pequeno porte, por exemplo, tipo M4247, são convenientes. Você pode usar quase qualquer microamperímetro e até um miliamperímetro - com qualquer limite de escala. Para fazer isso, você deve ajustar os valores dos resistores R15-R17 de acordo.
Ressonador de quartzo Q - qualquer relógio de quartzo de tamanho pequeno (semelhantes também são usados em jogos eletrônicos portáteis).
Switch S1 - qualquer tipo, compacto.
As bobinas do sensor são feitas em núcleos redondos de ferrite com diâmetro de 8 mm (usados em antenas magnéticas de receptores de rádio MW e LW) e comprimento de cerca de 10 cm. Cada enrolamento é composto por 200 espiras de fio de cobre com diâmetro de 0,31 mm, enrolado uniforme e firmemente em duas camadas em isolamento de seda e laca dupla. Uma camada de folha de tela é anexada a todos os enrolamentos. As bordas da tela são isoladas umas das outras para evitar a formação de uma bobina em curto-circuito. A saída da tela é realizada com um fio monopolar de cobre estanhado. No caso de uma tela de folha de alumínio, este fio é sobreposto na tela por todo o seu comprimento e é enrolado firmemente com fita isolante. No caso de uma blindagem feita de folha de cobre ou latão, o chumbo é soldado.
As extremidades dos núcleos de ferrite são fixadas em discos de centragem fluoroplásticos, graças aos quais cada uma das duas metades do sensor é mantida dentro de um tubo plástico feito de textolite, que serve como alojamento, conforme esquematicamente mostrado na Fig. 34.

Arroz. 34. O design do sensor-antena
O comprimento do tubo é de cerca de 60 cm. Cada uma das metades do sensor está localizada na extremidade do tubo e é adicionalmente fixada com selante de silicone, que preenche o espaço ao redor dos enrolamentos e seus núcleos. O enchimento é realizado através de orifícios especiais no corpo-tubo. Juntamente com as arruelas de fluoroplástico, esse selante confere à fixação de hastes de ferrite frágeis a elasticidade necessária, o que evita que elas rachem durante impactos acidentais.
Configurando o dispositivo
1. Certifique-se de que a instalação esteja correta.
2. Verifique o consumo de corrente, que não deve ultrapassar 100 mA.
3. Verifique o correto funcionamento do oscilador mestre e outros elementos da formação de sinais de pulso.
4. Ajuste o circuito oscilatório do sensor. Radiando - a uma frequência de 4 kHz, recebendo - a 8 kHz.
5. Certifique-se de que o caminho de amplificação e o detector síncrono funcionem corretamente.
Trabalhando com o dispositivo
O procedimento para configurar e trabalhar com o dispositivo é o seguinte. Vamos ao local de pesquisa, ligamos o dispositivo e começamos a girar o sensor da antena. Melhor em um plano vertical passando na direção norte-sul. Se o sensor do dispositivo estiver na haste, você não poderá girá-lo, mas girá-lo até onde a haste permitir. A agulha indicadora irá defletir (efeito de bússola). Usando um resistor variável R5, estamos tentando minimizar a amplitude desses desvios. Nesse caso, o ponto médio das leituras do microamperímetro "se moverá para fora" e também precisará ser ajustado com outro resistor variável R16, projetado para definir zero. Quando o efeito "bússola" se torna mínimo, o dispositivo é considerado equilibrado.
Para objetos pequenos, o método de busca com um magnetômetro diferencial não difere do método de trabalho com um detector de metais convencional. Perto do objeto, a seta pode desviar em qualquer direção. Para objetos grandes, a seta indicadora se desviará em diferentes direções em uma grande área.
Leia e escrevaútil
O magnetômetro diferencial trazido à sua atenção pode ser muito útil para procurar grandes objetos de ferro. É praticamente impossível procurar tesouros com esse dispositivo, mas é indispensável ao procurar tanques, navios e outros tipos de equipamentos militares afundados.
O princípio de funcionamento de um magnetômetro diferencial é muito simples. Qualquer objeto ferromagnético distorce o campo magnético natural da Terra. Esses itens incluem tudo feito de ferro, ferro fundido e aço. A magnetização intrínseca dos objetos, que ocorre com frequência, também pode afetar significativamente a distorção do campo magnético. Tendo corrigido o desvio da força do campo magnético do valor de fundo, podemos concluir que há um objeto feito de material ferromagnético próximo ao dispositivo de medição.
A distorção do campo magnético da Terra longe do alvo é pequena, e é estimada a partir da diferença de sinais de dois sensores separados por alguma distância. Portanto, o dispositivo é chamado de diferencial. Cada sensor mede um sinal proporcional à força do campo magnético. Sensores ferromagnéticos e sensores baseados na precessão magnetônica de prótons são os mais utilizados. O dispositivo em consideração usa sensores do primeiro tipo.
A base de um sensor ferromagnético (também chamado de fluxgate) é uma bobina com um núcleo de material ferromagnético. Uma curva de magnetização típica para tal material é bem conhecida de um curso de física escolar e, levando em conta a influência do campo magnético da Terra, tem a seguinte forma, mostrada na Fig. 29.
Arroz. 29. Curva de magnetização
A bobina é excitada por um sinal senoidal alternado da frequência portadora. Como pode ser visto a partir da fig. 29, o deslocamento da curva de magnetização do núcleo ferromagnético da bobina pelo campo magnético externo da Terra leva ao fato de que a indução do campo e a tensão associada na bobina começam a se distorcer de maneira assimétrica. Em outras palavras, a tensão do sensor com uma corrente senoidal da frequência portadora diferirá da senóide por topos mais "achatados" das meias-ondas. E essas distorções serão assimétricas. Na linguagem da análise espectral, isso significa o aparecimento no espectro da tensão de saída da bobina de harmônicos pares, cuja amplitude é proporcional à força do campo magnético de polarização (campo da Terra). São esses harmônicos pares que devem ser "capturados".

Arroz. 30. Sensor ferromagnético diferencial
Antes de mencionar o detector síncrono que naturalmente se propõe para este fim, operando com um sinal de referência de frequência de dupla portadora, consideremos o projeto de uma versão complicada de um sensor ferromagnético. É composto por dois núcleos e três bobinas (Fig. 30). Em sua essência, é um sensor diferencial. No entanto, por simplicidade, não o chamaremos de diferencial mais adiante no texto, pois o próprio magnetômetro já é diferencial (©).
O projeto consiste em dois núcleos ferromagnéticos idênticos com bobinas idênticas colocadas em paralelo uma ao lado da outra. Em relação ao sinal elétrico excitatório da frequência de referência, eles são incluídos na direção oposta. A terceira bobina é um enrolamento enrolado no topo das duas primeiras bobinas de núcleo empilhadas juntas. Na ausência de um campo magnético de polarização externa, os sinais elétricos do primeiro e segundo enrolamentos são simétricos e idealmente atuam de modo que não haja sinal de saída no terceiro enrolamento, pois os fluxos magnéticos através dele são completamente cancelados.
Na presença de um campo magnético de polarização externa, a imagem muda. Um ou outro núcleo no pico da meia onda correspondente "voa" para uma saturação mais profunda do que o normal devido à influência adicional do campo magnético da Terra. Como resultado, um sinal de incompatibilidade de frequência dupla aparece na saída do terceiro enrolamento. Os sinais harmônicos fundamentais são idealmente totalmente compensados lá.
A conveniência do sensor considerado reside no fato de que suas bobinas podem ser incluídas para aumentar a sensibilidade em circuitos oscilatórios. O primeiro e o segundo - no circuito oscilatório (ou circuito), sintonizado na frequência da portadora. O terceiro - em um circuito oscilatório sintonizado no segundo harmônico.
O sensor descrito tem um padrão de radiação pronunciado. Seu sinal de saída é máximo quando o eixo longitudinal do sensor está localizado ao longo das linhas de força do campo magnético externo constante. Quando o eixo longitudinal é perpendicular às linhas de força, o sinal de saída é zero.
O sensor do tipo considerado, especialmente em combinação com um detector síncrono, pode funcionar com sucesso como uma bússola eletrônica. Seu sinal de saída após a retificação é proporcional à projeção do vetor de força do campo magnético da Terra no eixo do sensor. A detecção síncrona também permite descobrir o sinal dessa projeção. Mas mesmo sem um sinal - orientando o sensor no mínimo do sinal, obtemos a direção para oeste ou leste. Orientando ao máximo - obtemos a direção da linha do campo magnético do campo da Terra. Em latitudes médias (por exemplo, em Moscou), ele vai obliquamente e "gruda" no solo na direção do norte. De acordo com o ângulo de declinação magnética, pode-se estimar aproximadamente a latitude geográfica da área.
Os magnetômetros ferromagnéticos diferenciais têm suas vantagens e desvantagens. As vantagens incluem a simplicidade do dispositivo, não é mais complicado do que um receptor de rádio de amplificação direta. As desvantagens incluem a complexidade dos sensores de fabricação - além da precisão, é necessária uma correspondência absolutamente exata do número de voltas dos enrolamentos correspondentes. Um erro de uma ou duas voltas pode reduzir bastante a sensibilidade possível. Outra desvantagem é a “bússola” do dispositivo, ou seja, a impossibilidade de compensação completa do campo da Terra subtraindo sinais de dois sensores espaçados. Na prática, isso leva a sinais falsos quando o sensor é girado em torno de um eixo perpendicular ao longitudinal.
Projeto prático
O projeto prático de um magnetômetro ferromagnético diferencial foi implementado e testado em uma versão protótipo sem uma parte eletrônica especial para indicação sonora, utilizando apenas um microamperímetro com zero no meio da escala. O esquema de indicação de som pode ser obtido da descrição do detector de metais de acordo com o princípio "transmissão-recepção". O dispositivo tem os seguintes parâmetros.
Principais características técnicas
Tensão de alimentação 15... 18 V
Consumo de corrente não superior a 50 mA
Profundidade de detecção:
arma 2m
cano de canhão 4 m
tanque 6 m
Esquema estrutural

Arroz. 31. Diagrama estrutural de um magnetômetro ferromagnético diferencial
O diagrama de blocos é mostrado na fig. 31. Um oscilador mestre estabilizado por quartzo fornece uma freqüência de clock para o condicionador de sinal.
Em uma de suas saídas, há uma onda quadrada do primeiro harmônico, que entra no amplificador de potência, que excita as bobinas radiantes dos sensores 1 e 2. A outra saída forma uma onda quadrada da frequência de clock duplo de referência com um deslocamento de 90 ° para o detector síncrono. O sinal de diferença dos enrolamentos de saída (terceiros) dos sensores é amplificado no amplificador receptor e retificado por um detector síncrono. Um sinal constante retificado pode ser registrado com um microamperímetro ou dispositivos de indicação sonora descritos nos capítulos anteriores.
diagrama de circuito
O diagrama esquemático de um magnetômetro ferromagnético diferencial é mostrado na fig. 32 - parte 1; oscilador mestre, condicionador de sinal, amplificador de potência e bobinas radiantes, fig. 33 - parte 2: bobinas receptoras, amplificador receptor, detector síncrono, indicador e fonte de alimentação.

Arroz. 32. Diagrama esquemático - parte I
GERADOR MESTRE (FIG. 32)
O oscilador mestre é montado nos inversores D1.1-D1.3. A frequência do oscilador é estabilizada por um ressonador Q de quartzo ou piezocerâmico com uma frequência ressonante de 215 Hz = 32 kHz ("quartzo relógio"). O circuito R1C1 evita a excitação do gerador em harmônicos mais altos. Através do resistor R2, o circuito OOS é fechado, através do ressonador Q, o circuito POS é fechado. O gerador é caracterizado pela simplicidade, baixo consumo de corrente, operação confiável em uma tensão de alimentação de 3 ... 15 V, não contém trimmers e resistores de alta resistência. A frequência de saída do gerador é de cerca de 32 kHz.
GERADOR DE SINAL (FIG. 32)
O condicionador de sinal é montado em um contador binário D2 e um D-trigger D3.1. O tipo de contador binário não é fundamental, sua principal tarefa é dividir a frequência do clock por 2, por 4 e por 8, obtendo assim meandros com frequências de 16, 8 e 4 kHz, respectivamente. A frequência portadora para excitação das bobinas radiantes é de 4 kHz. Sinais com frequências de 16 e 8 kHz, atuando no D-flip-flop D3.1, formam em sua saída um meandro dobrado em relação à frequência da portadora de 8 kHz, deslocado em 90° em relação ao sinal de saída do 8 kHz contador binário kHz. Tal deslocamento é necessário para a operação normal do detector síncrono, uma vez que o mesmo deslocamento possui um sinal útil de descasamento de frequência dupla na saída do sensor. A segunda metade do microcircuito de dois flip-flops D - D3.2 não é usada no circuito, mas suas entradas não utilizadas devem ser conectadas à lógica 1 ou lógica 0 para operação normal, mostrada no diagrama.
AMPLIFICADOR DE POTÊNCIA (FIG. 32)
O amplificador de potência não se parece com isso e são apenas poderosos inversores D1.4 e D1.5, que em antifase oscilam um circuito oscilatório composto por bobinas radiantes conectadas em série-paralelo do sensor e do capacitor C2. Um asterisco próximo ao valor do capacitor significa que seu valor é indicado aproximadamente e que deve ser selecionado durante o comissionamento. Um inversor D1.6 não utilizado, para não deixar sua entrada desconectada, inverte o sinal D1.5, mas fica praticamente "inativo". Os resistores R3 e R4 limitam a corrente de saída dos inversores a um nível aceitável e, juntamente com o circuito oscilatório, formam um filtro passa-banda de alta qualidade, devido ao qual a forma da tensão e da corrente nas bobinas radiantes do sensor quase coincide com uma sinusoidal.

Arroz. 33. Diagrama esquemático - parte II. Amplificador de recepção
AMPLIFICADOR DE RECEPÇÃO (FIG. 33)
O amplificador receptor amplifica o sinal de diferença proveniente das bobinas receptoras do sensor, que junto com o capacitor C3 formam um circuito oscilatório sintonizado em uma frequência dupla de 8 kHz. Graças ao resistor de sintonia R5, os sinais das bobinas receptoras são subtraídos com alguns coeficientes de ponderação, que podem ser alterados movendo o controle deslizante do resistor R5. Isso obtém compensação para parâmetros não idênticos dos enrolamentos de recepção do sensor e minimização de sua "bússola". O amplificador receptor é de dois estágios. Ele é montado nos amplificadores operacionais D4.2 e D6.1 com um sistema operacional de tensão paralela. O capacitor C4 reduz o ganho em frequências mais altas, evitando assim a sobrecarga do caminho de amplificação com captadores de alta frequência de redes de energia e outras fontes. Os circuitos de correção de amplificador operacional são padrão.
DETECTOR SÍNCRONO (FIG. 33)
O detector síncrono é feito no OS D6.2 de acordo com um esquema típico. O chip D5 CMOS 8 por 1 multiplexador-desmultiplexador é usado como chaves analógicas (Fig. 32). Seu sinal de endereço digital é movido apenas no bit menos significativo, proporcionando comutação alternada dos pontos K1 e K2 para um barramento comum. O sinal retificado é filtrado pelo capacitor C8 e amplificado pelo amplificador operacional D6.2 com atenuação adicional simultânea de componentes de RF não filtrados pelos circuitos R14C11 e R13C9. O circuito de correção do amplificador operacional é padrão para o tipo usado.
INDICADOR (FIG. 33)
O indicador é um microamperímetro com zero no meio da escala. Na parte do indicador, os circuitos de outros tipos de detectores de metal descritos anteriormente podem ser usados com sucesso. Em particular, como indicador, você pode usar o projeto de um detector de metais baseado no princípio de um medidor de frequência eletrônico. Neste caso, seu oscilador LC é substituído por um oscilador RC, e a tensão de saída medida é alimentada através de um divisor resistivo para o circuito de ajuste de frequência do temporizador. Você pode ler mais sobre isso no site de Yuri Kolokolov.
O chip D7 estabiliza a tensão de alimentação unipolar. O amplificador operacional D4.1 cria um ponto de alimentação intermediário artificial, permitindo o uso de circuitos convencionais de amplificador operacional bipolar. Os capacitores de bloqueio cerâmicos C18-C21 são montados próximos às carcaças dos circuitos digitais D1, D2, D3, D5.
Tipos de peças e design
Os tipos de microcircuitos utilizados estão indicados na Tabela. 6.
Tabela 6. Tipos de microcircuitos utilizados
Em vez de microcircuitos da série K561, é possível usar microcircuitos da série K1561. Você pode tentar usar alguns chips da série K176 ou análogos estrangeiros das séries 40XX e 40XXX.
Os amplificadores operacionais duplos (amp-op) da série K157 podem ser substituídos por quaisquer amplificadores operacionais de uso geral de parâmetros semelhantes (com alterações correspondentes nos circuitos de pinagem e correção).
Não há requisitos especiais para os resistores usados no circuito do magnetômetro diferencial. Eles só precisam ser robustos e em miniatura em design e fáceis de instalar. A taxa de dissipação de energia é de 0,125 ... 0,25 W.
Os potenciômetros R5, R16 são multi-voltas desejáveis para a conveniência de ajustar o dispositivo. A alça do potenciômetro R5 deve ser de plástico e ter comprimento suficiente para que o toque da mão do operador durante o ajuste não provoque alterações nas leituras do indicador devido a pickups. Capacitor C16 - eletrolítico de qualquer tipo de pequeno porte.
Os capacitores dos circuitos oscilatórios C2 * e C3 * consistem em vários (5-10 pcs.) Capacitores conectados em paralelo. O ajuste do circuito em ressonância é realizado selecionando o número de capacitores e sua classificação. O tipo recomendado de capacitores é K10-43, K71-7 ou análogos termoestáveis estrangeiros. Você pode tentar usar capacitores convencionais de filme cerâmico ou metálico, porém, com flutuações de temperatura, você terá que ajustar o dispositivo com mais frequência.
Microamperímetro - qualquer tipo para uma corrente de 100 μA com zero no meio da escala. Microamperímetros de pequeno porte, por exemplo, tipo M4247, são convenientes. Você pode usar quase qualquer microamperímetro e até um miliamperímetro - com qualquer limite de escala. Para fazer isso, você deve ajustar os valores dos resistores R15-R17 de acordo. Ressonador de quartzo Q - qualquer relógio de quartzo de tamanho pequeno (semelhantes também são usados em jogos eletrônicos portáteis).
Switch S1 - qualquer tipo, compacto.

Arroz. 34. O design do sensor-antena
As bobinas do sensor são feitas em núcleos redondos de ferrite com diâmetro de 8 mm (usados em antenas magnéticas de receptores de rádio MW e LW) e comprimento de cerca de 10 cm. Cada enrolamento é composto por 200 espiras de fio de cobre com diâmetro de 0,31 mm, enrolado uniforme e firmemente em duas camadas em isolamento de seda e laca dupla. Uma camada de folha de tela é anexada a todos os enrolamentos. As bordas da tela são isoladas umas das outras para evitar a formação de uma bobina em curto-circuito. A saída da tela é realizada com um fio monopolar de cobre estanhado. No caso de uma tela de folha de alumínio, este fio é sobreposto na tela por todo o seu comprimento e é enrolado firmemente com fita isolante. No caso de uma blindagem feita de folha de cobre ou latão, o chumbo é soldado.
As extremidades dos núcleos de ferrite são fixadas em discos de centragem fluoroplásticos, graças aos quais cada uma das duas metades do sensor é mantida dentro de um tubo plástico feito de textolite, que serve como alojamento, conforme esquematicamente mostrado na Fig. 34. O comprimento do tubo é de cerca de 60 cm. Cada uma das metades do sensor está localizada na extremidade do tubo e é adicionalmente fixada com selante de silicone, que preenche o espaço ao redor dos enrolamentos e seus núcleos. O enchimento é realizado através de orifícios especiais no corpo-tubo. Juntamente com as arruelas de fluoroplástico, esse selante confere à fixação de hastes de ferrite frágeis a elasticidade necessária, o que evita que elas rachem durante impactos acidentais.
Configurando o dispositivo
1. Certifique-se de que a instalação esteja correta.
2. Verifique o consumo de corrente, que não deve ultrapassar 100 mA.
3. Verifique o correto funcionamento do oscilador mestre e outros elementos da formação de sinais de pulso.
4. Ajuste o circuito oscilatório do sensor. Radiando - a uma frequência de 4 kHz, recebendo - a 8 kHz.
5. Certifique-se de que o caminho de amplificação e o detector síncrono funcionem corretamente.
Trabalhando com o dispositivo
O procedimento para configurar e trabalhar com o dispositivo é o seguinte. Vamos ao local de pesquisa, ligamos o dispositivo e começamos a girar o sensor da antena. Melhor em um plano vertical passando na direção norte-sul. Se o sensor do dispositivo estiver na haste, você não poderá girá-lo, mas girá-lo até onde a haste permitir. A agulha indicadora irá defletir (efeito de bússola). Usando um resistor variável R5, estamos tentando minimizar a amplitude desses desvios. Nesse caso, o ponto médio das leituras do microamperímetro "se moverá para fora" e também precisará ser ajustado com outro resistor variável R16, projetado para definir zero. Quando o efeito "bússola" se torna mínimo, o dispositivo é considerado equilibrado.
Para objetos pequenos, o método de busca com um magnetômetro diferencial não difere do método de trabalho com um detector de metais convencional. Perto do objeto, a seta pode desviar em qualquer direção. Para objetos grandes, a seta indicadora se desviará em diferentes direções em uma grande área.
Como fazer seu próprio variômetro (magnetômetro) É possível monitorar você mesmo as perturbações do campo magnético da Terra? A resposta é óbvia - sim, você pode, e a maneira mais fácil de fazer isso é visualizar regularmente os dados do observatório magnético mais próximo na Internet. Bem, se você não tem um computador e a Internet por perto e mora em uma região da Rússia onde não há observatório magnético por perto, você pode fazer um dispositivo que o ajudará a avaliar o estado do campo magnético da Terra. Além do termômetro e barômetro doméstico, a bússola pode ser tão simples e útil quanto um dispositivo para detectar distúrbios no campo magnético da Terra. Não tente ver como a agulha da bússola corre durante uma tempestade magnética - esta imagem está na consciência dos autores de obras de arte. Uma das maiores tempestades magnéticas dos últimos 100 anos na latitude de Moscou foi observada em outubro de 2003 - o desvio máximo no componente horizontal atingiu um valor de cerca de 2000 nT, que, com o valor do próprio componente H de 17000 nT , é de apenas 10%. Levando em conta o fato de que tal mudança dura unidades e dezenas de minutos - ou seja, o processo de mudança do campo magnético em si é bastante lento - você precisa manter os olhos na agulha da bússola por pelo menos 15 minutos para notar tal desvio. É claro que é praticamente impossível captar tal momento sem ter um sistema de registro contínuo das variações do campo magnético. Deve-se ter em mente que a variação solar-diurna regular em um campo silencioso está na faixa de 30 a 40 nT, ou seja, 0,05%, durante tempestades magnéticas médias o desvio é de 200-300 nT, ou seja cerca de 0,5%. Portanto, fica claro que um dispositivo para monitoramento de distúrbios de campo magnético deve ser um sensor suficientemente sensível com registro eletrônico. Como exemplo, você pode ver o desenvolvimento de dispositivos simples para observar as variações do campo magnético por conta própria no site do laboratório de física ionosférica da Universidade de Lancaster http://www.dcs.lancs.ac.uk/iono/aurorawatch/ detectors/results.html ou no site do projeto POETRY (Public Outreach, Education, Teaching and Reaching Youth), ver http://image.gsfc.nasa.gov/poetry/. Para começar, você pode tentar montar o detector de distúrbios mais simples - um ímã suspenso em uma garrafa de plástico. Para ler as leituras, são utilizados um espelho e um iluminador, de modo que a lebre refletida é fixada em uma folha de papel a alguma distância do detector. Observando regularmente os movimentos de um coelho no papel, pode-se notar perturbações do campo magnético. Nos sites da Lancaster University e do projeto POETRY, todo o design é apresentado de forma tão clara que não deve haver problemas em repeti-lo, os detalhes do design são os mais simples. Mas você precisa ter em mente que a sensibilidade desse detector é baixa e você só pode registrar grandes tempestades, e essas tempestades acontecem apenas algumas vezes por ano. Um detector mais sensível pode ser montado com base em uma boa bússola. Tal projeto exigirá conhecimento e habilidade para montar circuitos eletrônicos. Os detalhes da construção são apresentados no mesmo site da Lancaster University, veja http://www.dcs.lancs.ac.uk/iono/aurorawatch/detectors/compass.html sam-europe.de/en/index_en.html. A partir das informações acima, podemos concluir que as informações sobre as perturbações do campo magnético da Terra podem ser obtidas de várias fontes, até o fato de que se pode realizar observações. É claro que tais observações serão inferiores aos observatórios magnéticos profissionais, mas para fins de projetos amadores ou educacionais, essa abordagem é bastante justificada. Clube "Hélios"
Para reparos e outros problemas técnicos, clique aqui. Reparação de equipamentos domésticos e de escritório.
Construa um magnetômetro precessional de prótons. Kuban Krasnodar.
Tradução com acréscimos e notas, ed. L.I. Volkova. [e-mail protegido] Zaporozhye, outubro de 2008
No artigo citado, os acréscimos e comentários do autor estão em itálico.
O O projeto educacional "quintal" é implementado utilizando componentes eletrônicos amplamente utilizados. Este instrumento usa um contador para medir a frequência de precessão de prótons em um campo magnético após sua polarização pulsada. O controle de frequência da precessão de prótons em um campo magnético é baseado em uma constante física estrita. Extenso material de referência, bem como aplicações práticas de magnetômetros de prótons, são descritos em The Amateur Scientist, fevereiro de 1968 - ver resp. coluna editada pela Scientific American. O projeto de um magnetômetro de bobina dupla também é descrito lá. As informações deste artigo foram a base desse desenvolvimento. Pouco depois de encontrar um artigo sobre esse projeto na Scientific American em fevereiro de 1968, percebi que alguém poderia tentar adicionar um contador de frequência a um magnetômetro de prótons. Este projeto científico chamado "ciência de quintal" é de interesse para medir a força do campo magnético da Terra em um ponto específico. Se, no entanto, o dispositivo for complementado com um conversor digital-analógico, será possível conectar um gravador de diagramas.
Alguns anos atrás eu construí um magnetômetro precessional (magnetômetro fluxgate). Sua descrição é dada em um artigo de Richard Nobles, publicado em setembro de 1991 na revista Electronics World + Wireless World (World of Electronics - Wireless World). No padrão de radiação deste dispositivo, os máximos da força do campo magnético estão nas direções leste e oeste, e os cruzamentos de zero estão nas direções norte e sul. Na área do centro de ciências do quintal, os ruídos são bastante decentes. Poderosos harmônicos de frequência de energia emitidos por linhas de energia se estendem até a faixa de frequência de áudio, onde competem com a frequência fundamental da despolarização de prótons. Esses ruídos só podem ser tratados pela inclusão diferencial (oposta) das bobinas do sensor, a orientação ideal do sensor no campo magnético da Terra e amostragem digital padrão do sinal de áudio.
e você será levado para o site do USGS (EUA) Fredericksburg Monitoring Science Center, perto do qual há um quintal.
FUNDAMENTOS FÍSICOS DA OPERAÇÃO DE UM MAGNETÔMETRO DE PRECESSÃO
O funcionamento dos magnetômetros precessionais é baseado na constante atômica, que determina a frequência de precessão do eixo de rotação do próton em um campo magnético. Na física e em várias outras ciências, é conhecida como frequência de Larmor.
Atualmente, existem abordagens da mecânica quântica para explicar esse fenômeno e, no entanto, a explicação clássica está mais amplamente disponível, é mais receptiva. Um próton é uma partícula carregada que pode ser representada girando em torno de seu eixo central. A rotação de uma partícula carregada sempre gera um campo magnético, de modo que o próton pode ser representado como uma espécie de microímã elementar. A imposição de um campo magnético externo não altera a frequência angular de rotação do próton, mas provoca oscilações (precessão) de seu eixo magnético. Assim, o efeito do campo magnético externo sobre o próton é equilibrado.
A lei de Larmor não é satisfeita para campos magnéticos fracos, quando uma energia inferior a 3kT é aplicada ao próton do lado de fora. Em campos magnéticos fracos, prevalece um deslocamento caótico (arbitrário) do eixo magnético do próton devido a efeitos térmicos e outras interações intermoleculares. Portanto, em campos magnéticos fracos, a precessão caótica de prótons é uma fonte de ruído eletromagnético significativo.
[Observação por. Na infância, quem lançava um pião mecânico de brinquedo e depois o batia levemente, observava o fenômeno da precessão. Um pião giratório, após aplicar o menor impulso externo (clique), instantaneamente se desvia de seu eixo de rotação anterior e começa a oscilar em torno dele com certa frequência.
Nosso planeta Terra também gira continuamente em torno de seu eixo com uma inclinação do eixo de rotação em relação ao eixo da eclíptica de 23 graus 26 minutos, e um período de rotação de 23h56m; está constantemente no campo de atração de um objeto espacial maior - uma estrela de próton-hélio em rotação - o Sol, em torno do qual gira com um período de 365,25 dias terrestres. Os poderosos campos gravitacionais e magnéticos do Sol se sobrepõem aos campos gravitacionais e magnéticos do magma derretido em rotação, da crosta terrestre e de uma enorme massa de água contendo prótons, bem como de muitos outros materiais magneto-suscetíveis do planeta Terra.
O período de precessão do eixo de rotação da Terra pelos nossos padrões é enorme - um pouco menos de 26.000 anos terrestres. Ao longo deste período, a inclinação do eixo de rotação da Terra em relação ao eixo da eclíptica flutua harmonicamente dentro de ±23 graus e 26 minutos. Esta é a principal razão para a mudança climática global periódica de longo prazo em nosso planeta.
Basta dizer que a existência bíblica da última civilização humana, que começa a partir do momento em que Deus deu ao primeiro homem terreno Adão Sua Palavra e Seu Espírito Santo (os períodos antediluviano e pós-diluviano até nossos dias) é um pouco mais mais de um quarto do período de precessão do eixo de rotação da Terra em torno do eixo da eclíptica! (Na Fig. 1, este é o setor inferior direito).
Escala de declinação

Arroz. 1. Movimento precessional do pólo celeste ao longo das constelações circumpolares. O pólo celeste se move muito lentamente ao longo das constelações circumpolares, precessando em torno do eixo da eclíptica com um período de quase 26.000 anos. Ao mesmo tempo, passa sucessivamente pelas seguintes constelações: Hércules (-8.000-6.000 anos a.C.), Dragão (-6.000-2.000 anos a.C.), Ursa Menor (-2.000-0 + 3.500 anos antes e depois d.C.), Cefeu (3500-8000 d.C.), Cygnus (8000-13000 d.C.), Lyra (13.000-15.500 d.C.) e novamente Dragão (depois de 15.500 d.C.). A gradação por anos é aproximada. Ao longo de 26.000 anos, o eixo da eclíptica também muda em a direção do movimento de todo o sistema solar por uma pequena quantidade - aproximadamente 4? (De acordo com o livro: F.Yu. Siegel. Treasures starry sky. M: Nauka, GRFML, 1987, pp. 67-68, 276- 277.)
A Terra também é periodicamente afetada por seu satélite - a Lua, assim como todos os outros 8 (9) planetas do Sistema Solar. Devido à rotação periódica da Lua em torno da Terra, ocorrem marés periódicas de água nos mares e oceanos: uma enorme massa de água terrestre contém um grande número de prótons, bem como átomos de oxigênio paramagnéticos, levados pelas forças gravitacionais e magnéticas. campos da Lua, bem como todos os outros planetas do sistema solar.
Cerca de 80% de uma pessoa é constituída de água, portanto, como todas as águas da Terra, ela, em maior ou menor grau, sente tanto as tempestades magnéticas no Sol, quanto as fases da Lua (lua cheia), e as influência de todos os outros planetas do sistema solar. Uma pessoa sente campos gravitacionais na forma de peso (massa). Quanto aos campos magnéticos da Terra, do Sol, da Lua e de todos os outros planetas, a humanidade está tão acostumada com sua existência eterna e suas mudanças periódicas naturais que a maioria das pessoas não percebe e, por assim dizer, também não sente essas campos ou suas mudanças, por mais que perceba o som das ondas que vivem à beira-mar.
A suscetibilidade magnética da água e da grande maioria dos elementos químicos, seus compostos e formações estruturais na Terra está próxima da unidade. No entanto, alguns elementos químicos e suas formações estruturais (uma série de cristais e ligas à base de ferro, níquel, cobalto, etc.) são altamente suscetíveis magneticamente. No sangue humano, o componente básico é a água. Várias moléculas, seus grupos hidroxila e agregados são dissolvidos nela, agrupando-se permanentemente nas mais complexas estruturas biológicas complexas contendo ferro, que é multivalente e se encaixa em muitas formas estruturais com diferentes suscetibilidades magnéticas. Portanto, parte da humanidade é altamente suscetível a mudanças locais no campo magnético da Terra devido a tempestades solares magnéticas e flutuações locais do magma terrestre. Algumas pessoas hipersensíveis não só podem perceber as microflutuações do campo magnético da Terra, mas também podem colocar sua hipersensibilidade em prática - por exemplo, podem encontrar fontes de água subterrâneas (radiestesia).
O acima dito ao fato de que em magnetômetros de prótons, os sensores de campo magnético externo não são bobinas como tal, mas o próprio líquido contendo prótons - água, querosene e muitos outros líquidos de hidrocarbonetos, vários álcoois, etc. As bobinas do sensor são necessário para a polarização de prótons em seu meio contendo prótons escolhido, bem como para capturar sinais fracos da precessão de relaxamento de prótons polarizados. Portanto, as leituras de magnetômetros precessionais de prótons, via de regra, não dependem do projeto dos sensores.
Fim aprox. por.].
O próton reage à perturbação devido ao campo magnético externo aplicado, precessando seu eixo de rotação com uma certa frequência angular, que é uma constante exata [padrão de hidrogênio], é chamado de coeficiente giromagnético. Para prótons, esse fator é arredondado para 267,53x1E6 radianos por segundo/Tesla ou 42,58 MHz/Tesla.
[Observação por. Aqui, o coeficiente giromagnético é dado no sistema SI. Em trabalhos anteriores, (por exemplo, por Hougaard), é dado como 4,258-4,26 kHz / Gauss, que é equivalente, porque 1 Tesla = 10^4 Gauss].
Nas latitudes do norte dos Estados Unidos, a força média do campo magnético é de cerca de 50.000 - 55.000 nanoTesla, variando de acordo com o local de medição. Devido a tempestades magnéticas periódicas, ocorrem mudanças de curto prazo na força do campo magnético da Terra, que podem atingir várias centenas de nanoTesla. As mudanças diárias causadas pelos ventos solares na ionosfera estão dentro de dezenas de nanoTesla. Em geral, a intensidade média do campo magnético da Terra nessas latitudes está diminuindo constantemente na faixa de menos 90 nanoTesla por ano.
[Este não é o fim do mundo, mas a consequência usual da precessão do eixo de rotação da Terra em torno do eixo da eclíptica. A precessão do eixo de rotação da Terra tem um impacto significativo no clima de todos os seus continentes - ver acima ed. Aproximadamente. trad.]
Ao medir a frequência da precessão do próton no campo magnético da Terra com um dispositivo especial, descobrimos que essa frequência está na faixa acústica:
Exemplo: 42,58 MHz/Tesla * 52500x1E-9 Tesla = 2235 Hz Na minha localização (ou seja, o autor deste artigo - aprox. Lane) (no nordeste), a frequência medida até agora é em média 2271 Hz, que corresponde ao a força média do campo magnético é de cerca de 53.300 nanoTesla. Este resultado está em excelente acordo com os dados de monitoramento do USGS para um ponto 160 milhas a oeste de Fredericksburg. Este valor também é consistente com o valor medido por um magnetômetro de precessão de referência que foi calibrado no campo de uma bobina de Helmholtz. Para obter o valor máximo da força do campo magnético da Terra em um determinado ponto, o eixo geométrico do sensor precessional do instrumento foi deslocado de uma posição horizontal para uma quase vertical.
[Observação por. As linhas de força magnética que fluem dos pólos magnéticos da Terra se fecham ao longo de trajetórias quase elípticas. A normal a essas linhas tem declinação zero apenas no equador. À medida que o observador se aproxima de um dos pólos da Terra, a declinação normal aumenta constantemente na direção do pólo próximo. Monte o segundo dos magnetômetros descritos neste artigo - e você será capaz de medir numericamente a força do campo magnético da Terra e a magnitude da declinação magnética para sua área, observar mudanças de curto e longo prazo em EMF devido a tempestades magnéticas solares, bem como mudanças precessionais em EMF, e com altíssima precisão. As medições devem ser realizadas longe de fontes de corrente, objetos metálicos, anomalias magnéticas, etc., levantando o sensor a uma altura de pelo menos 2 m acima do solo. Fim aprox. trad.]
Doze meses depois que os sensores acima começaram a chegar no quintal, notei uma diminuição no valor da frequência de leitura em nossa área em cerca de 6-7 Hertz. Inicialmente, os valores de frequência estavam em torno de 2277 - 2278 Hz. Isso também é consistente com a magnitude da mudança prevista para a área pelo serviço de monitoramento do USGS.
MAGNETÔMETRO DE PRECESSÃO DE PRÓTONS PARA ESTIMATIVA DA RESISTÊNCIA DO CAMPO GEOMAGNÉTICO E DETECÇÃO DE ANOMALIAS MAGNÉTICAS "POR OUVIDOS"

Arroz. 2 Diagrama de blocos de um magnetômetro precessional de prótons para avaliação da intensidade do campo geomagnético e detecção de anomalias magnéticas "POR AUDIÇÃO".
A Figura 2 mostra o diagrama de blocos da versão do dispositivo com a saída "somente áudio". A parte de contagem do circuito elétrico está faltando. O circuito contém apenas uma bobina do sensor (sensores), um amplificador de áudio e uma fonte de alimentação e um temporizador. O temporizador é utilizado para controlar o funcionamento do relé, que conecta alternadamente a bobina à fonte de polarização e à entrada do amplificador de áudio. (O diagrama mostra a forma de onda da saída do temporizador.)
[Observação por.
1. É melhor substituir o transistor bipolar por um de campo. Atualmente, os principais transistores de efeito FET de qualquer potência são produzidos em massa. Eles têm uma resistência muito maior no estado fechado do que os bipolares. Os processos transitórios associados ao aumento da capacitância do canal de um transistor FET de alta potência praticamente não desempenham um papel, uma vez que as medições da frequência de precessão de prótons geralmente começam não antes de 100-200 milissegundos após o final do pulso de corrente para sua polarização.
2. Para ajustar as bobinas do sensor à ressonância, são necessários capacitores altamente estáveis com baixa corrente de fuga. Na Fig. 2, o capacitor para sintonizar a bobina do sensor para ressonância é designado "capacitor de sintonia de bobina 0,25-0,62 mF". Se o dispositivo for projetado para funcionar em uma área, você poderá se limitar a um limite de medição, o que significa um capacitor. O número de limites de medição depende da faixa de operação do dispositivo, bem como do fator de qualidade do circuito LC na frequência de precessão de relaxamento de prótons - quanto maior, mais limites devem ser feitos. Portanto, torna-se necessário alternar os capacitores ressonantes. No magnetômetro MMP203, eles são acionados por uma chave convencional multiposição de limites de medição.
Os capacitores ressonantes também podem ser comutados com FETs. A corrente de controle é nanoamps, então o circuito de comutação do capacitor pode ser construído em lógica CMOS barata.
Fim aprox. trad.]
PROJETO DO SENSOR
No mercado, descobri uma super fonte local de estruturas de bobina para um sensor de magnetômetro, que pode ser usada simultaneamente como recipiente para um líquido contendo prótons. Esta é a parte do mercado onde as especiarias são encontradas. Procure especiarias com o volume e a forma do recipiente corretos. Descobri que estes são aqueles recipientes de plástico de paredes finas que têm sulcos de anel na parte inferior e logo abaixo da tampa. Eles são uma forma na qual uma bobina multi-voltas pode ser facilmente enrolada.

Fig.3. Construção de um sensor linear "garrafa" A Figura 3 mostra a bobina de um sensor linear com dimensões específicas. Há muitos tamanhos disponíveis. As bobinas mais preferidas têm cerca de 3,75 polegadas de comprimento. O tamanho maior do recipiente de especiarias [recipiente] permite uma bobina de sensor mais condutora. A baixa resistência da bobina fornece um fator de qualidade Q mais alto, bem como uma corrente de polarização maior (limitada pela potência da fonte de alimentação). Uma corrente de polarização maior aumenta a amplitude inicial do sinal de despolarização. O fator de qualidade mais alto da bobina Q também fornece uma modulação vibratória mais longa do sinal durante a despolarização. Observe que a indutância de uma bobina é proporcional ao quadrado do número de espiras, enquanto a resistência de uma bobina é diretamente proporcional ao número de espiras. Pode-se supor que os melhores resultados (fator Q de alta qualidade e ajuste seletivo (seletivo) de todo o circuito) serão obtidos usando o maior número possível de voltas e o maior tamanho de fio possível. Claro, um componente igualmente importante também é um capacitor, que é conectado à bobina para sintonizá-la na frequência [da precessão de prótons].
O valor da indutância da bobina deve ser suficiente para que um capacitor não muito caro possa ser usado para sintonizar de maneira ideal a bobina para o período (frequência) de despolarização. Um valor Q grande também contribui para obter uma largura de banda mais estreita de todo o circuito de medição, o que é muito importante para aumentar a relação sinal-ruído e reduzir a influência de componentes harmônicos mais altos (sobretons) do sinal amplificado. notas do autor
1. É possível que ao enrolar esta bobina de 700 voltas, o fio se encaixe em quatro camadas. A densidade ideal de camadas não é fácil de manter, então cinco camadas podem ser obtidas. Na verdade, o número de voltas não é crítico. Se você conseguir a última 700ª volta longe do final da bobina, continue enrolando até o final.
2. Com os parâmetros acima, obtive uma indutância de cerca de 10 miliHenry. Uma fórmula aproximada para calcular a indutância (desconsiderando a estratificação, que reduz a indutância em não mais de 5%):
L = (r2n2)/(10(r+l))
onde: r = 1/2 do diâmetro do quadro (garrafa), polegada
n = número de voltas
l = comprimento, polegada
3. Se todos os parâmetros acima forem atendidos, para duas bobinas de sensor conectadas em série, a capacitância do capacitor ressonante deve ser de cerca de 0,25 μF.
4. Os recipientes são preenchidos com líquido contendo prótons. Pode ser água destilada, querosene, metanol. Você também pode usar álcool isopropílico
5. Os recipientes de especiarias geralmente não são projetados para armazenar líquidos. Suas tampas podem ter forros de papel dentro que devem ser removidos. Para selar recipientes, tente fazer gaxetas de uma câmara de ar de bicicleta ou material similar.
Nas proximidades do quintal, o uso de duas bobinas melhorou significativamente a relação sinal-ruído. Para mim, duas bobinas idênticas deram o maior efeito. Para reduzir a interferência industrial, eles foram ligados em série e orientados cuidadosamente. A melhor relação sinal-ruído foi alcançada com a orientação paralela dos eixos das bobinas e sua conexão oposta.
[Observação por. Com um fator de alta qualidade da bobina do sensor, um EMF significativo pode se formar em suas extremidades nos momentos de comutação, portanto, a tensão de ruptura dos capacitores ressonantes e todos os elementos-chave deve ser a mais alta possível.]
[Adição do tradutor. Outros projetos de sensores de magnetômetros precessionais.
Arroz. 4. Bobinas de sensor tipo submersível. Precisamente essas bobinas (2 peças, dispostas paralelamente uma à outra, contra-atuando, + uma tela aberta comum ao redor do perímetro externo de ambas as bobinas) são usadas no sensor do conhecido magnetômetro MMP-203
Arroz. 5. Estrutura do sensor do tipo toroidal
Arroz. 6. Etapas intermediárias na fabricação de um sensor toroidal
Arroz. 7. Conjunto do sensor toroidal
Adendo do tradutor para esclarecer o ruído de fundo do sensor.
Os desenhos estão em ordem - fig 7, fig 8, fig 9.

ARROZ. oito.. Sinal de despolarização de prótons obtido de um sensor magnetômetro precessional (sensor de bobina única). Ao longo dos eixos: X - seg., Y - mV.
Para ouvir o sinal, clique no número da imagem.
ARROZ. 9..Espectro de frequência da parte mais obscura do sinal de despolarização do próton mostrado na Fig. 8 após um amplificador de banda estreita (sensor de bobina única).
Para ouvir o sinal, clique no número da imagem.
ARROZ. dez.. Este espectro de frequência foi obtido usando um método de medição de compensação, que se baseia na conexão oposta de duas bobinas, devido ao qual a maioria dos captadores e ruídos termomagnéticos, que são muito perceptíveis na Fig. 8 e 9. Após a subtração compensatória de pickups e ruído termomagnético, o espectrograma mostra uma distribuição linear da densidade espectral do sinal de precessão de relaxamento de prótons. O principal pico de precessão de prótons com uma frequência de cerca de 2 kHz é claramente visível. O pico principal do segundo harmônico da frequência fundamental (cerca de 4 kHz) não é menos claramente visível. Acima e abaixo do primeiro (cerca de 2 kHz) e segundo (cerca de 4 kHz) harmônicos da frequência de precessão de prótons, os picos dos satélites são observados. Suas frequências são deslocadas acima e abaixo do pico central de acordo com o fator de multiplicação de frequência (número harmônico) de acordo com as leis da interação spin-órbita. Os picos satélites do segundo harmônico são divididos em 2 picos. O pico inferior do satélite do segundo harmônico é claramente deslocado em direção às baixas frequências e torna-se um espelho simétrico ao pico superior. Obviamente, a precessão do eixo de rotação do próton de primeira ordem é fortemente assimétrica em relação ao centro de massa do próton (as energias das ligações opostas de prótons e elétrons (orbitais S e P) nas ligações SP? ). A precessão do eixo de rotação do próton de segunda ordem é praticamente simétrica em relação ao centro de sua massa (SP±1/2).
No início deste artigo, foi dito que a fonte do ruído de fundo intrínseco do sensor é a precessão termocaótica de prótons em campos geomagnéticos fracos. Para ler a frequência da precessão de relaxamento de prótons, o processo de medição deve ser organizado de modo que comece quase imediatamente após a corrente de polarização ser desligada e os processos transitórios serem concluídos, e continue em um intervalo de tempo limitado (na Fig. 8, isso é o intervalo mais sombreado), em que a amplitude do sinal útil excede o nível de ruído do sensor, cujas fontes são captadores e precessão caótica de prótons em campos geomagnéticos fracos com energia igual ou inferior a 3kT.
Sabe-se por experiência que a frequência fundamental do sinal de precessão de prótons (cerca de 2 kHz) é sempre sobreposta por um sinal sonoro vibrante, cuja fonte são as frequências combinadas. Sua origem pode ser compreendida após a análise da Fig. 10. A modulação acústica do sinal de precessão de prótons com uma frequência de cerca de 2 kHz por outras frequências é uma consequência da superposição no sinal principal de frequências combinadas formadas como resultado da adição-subtração dinâmica dos componentes harmônicos superiores e inferiores da ressonância oscilações na parte próxima do espectro acústico, incluindo a influência da ressonância magnética dividindo os níveis de energia do átomo de hidrogênio devido à interação espiorbital.
Fim do adendo trans.]
AMPLIFICADOR DE ÁUDIO

Arroz. 11. Diagrama de blocos de um amplificador de áudio seletivo
O amplificador de áudio é baseado em quatro transistores bipolares e um amplificador operacional duplo. O diagrama de blocos mostra a distribuição de ganho em cada estágio. Este amplificador também é um filtro ativo de banda estreita sintonizado na frequência esperada de precessão de prótons [para a área dada]. No máximo, o ganho é superior a 130 dB. A largura de banda teórica também é mostrada. O ganho total é muito grande, portanto, deve-se tomar cuidado durante a instalação para evitar a auto-excitação do amplificador.
Arroz. 12. Resposta de frequência do amplificador de áudio seletivo
Arroz. 13. Diagrama esquemático de um amplificador de áudio seletivo
Para aumentar a impedância de entrada do amplificador, há um resistor de 100 Ohm no emissor do transistor e 12 kOhm na base, o que possibilita reduzir a carga nas bobinas do sensor sintonizadas em ressonância. Um circuito sensor LC paralelo ressonante, formado por bobinas e um capacitor ressonante, tem uma impedância de cerca de 3000 ohms. Todos os outros elementos do estágio de entrada foram escolhidos de forma a fornecer uma boa relação sinal-ruído com o maior ganho possível. O ruído deste estágio é equivalente ao de um resistor de 560 ohms. No entanto, o ruído das bobinas de captação e captadores externos excede significativamente o ruído do próprio amplificador.
Observação. por. No segundo, terceiro e também nos estágios terminais, você pode usar um transistor composto com alto ganho do tipo BC847C (? = 400-1000). Essa substituição estreitará ainda mais a largura de banda e reduzirá a impedância de saída do amplificador para 1-3 kOhm (Re = 820 Ohm, Rk = 1-3 kOhm).

Arroz. 14. Arranjo estrutural das peças na placa do amplificador
Na fig. 14 abaixo mostra a localização das peças na placa do amplificador. Ele é montado em uma folha de fibra de vidro de dupla face [getinaks]. Todos os componentes são soldados com segurança, seus cabos são colocados em terminações de nylon ou teflon. Os fios que conectam componentes discretos devem ser mantidos o mais curtos possível. A placa do amplificador é colocada em uma caixa especialmente moldada, coberta com uma tela de alumínio (fita). A blindagem externa é conectada à placa interna por um jumper.
Observação. tradução Um magnetômetro de precessão de prótons é bom: a frequência de precessão de prótons não depende do design do sensor e do tipo de líquido contendo prótons, mas depende apenas da força do campo magnético externo. (Isso ocorre porque a permeabilidade magnética de líquidos e materiais típicos contendo prótons usados na fabricação de sensores é unitária). Mas a amplitude do sinal, o tempo de medição, bem como a relação sinal-ruído e, portanto, a sensibilidade do dispositivo como um todo, dependem muito das decisões de projeto do circuito que você tomou, do projeto e do rigor do circuito. fabricação do sensor e de todo o dispositivo como um todo.
A próxima página mostra um diagrama de um magnetômetro com um gerador adicional, cuja frequência de geração é sincronizada com a frequência de precessão [de prótons]. Este é um esquema bastante acessível de um dispositivo que permite medir a intensidade do campo magnético em uma região geomagnética local. Essas medições são geralmente realizadas apenas para fins informativos. Os interessados podem adaptar o dispositivo para outras aplicações práticas específicas. Meu objetivo era alcançar o custo-benefício e a disponibilidade de desenvolvimento, para que, quando fosse repetido, componentes padrão e prontamente disponíveis pudessem ser usados. A lógica CMOS que escolhi pode ser substituída por análogos TTL - mas será necessária uma fonte de alimentação mais potente.
ENVOLVA-SE NO PROJETO DE UM DISPOSITIVO COM UM GERADOR ADICIONAL!
DESCRIÇÃO DO PROJETO DE UM MAGNETÔMETRO COM UM GERADOR ADICIONAL E PLL

Fig.15. Diagrama funcional de um magnetômetro de prótons com oscilador adicional e PLL Este é um diagrama de blocos de um magnetômetro de prótons que adiciona a capacidade de medir a frequência de mudança na EMF gerada na bobina de captação pela precessão de prótons após a aplicação de uma corrente de polarização por alguns segundos . Quatro divisores decimais permitem exibir o resultado da medição com uma resolução de 1 ou 0,1 Hz. Uma resolução tão alta e com um tempo de medição inferior a um segundo foi obtida devido à multiplicação de N vezes da frequência medida do sinal de precessão.
O instrumento contém doze circuitos integrados (ICs) e um pequeno número de vários componentes discretos. O uso de circuitos integrados é mais econômico em todos os aspectos, pois esse dispositivo consiste em um pequeno número de elementos padrão típicos. Existem muitas alternativas para os CIs multifuncionais usados aqui - eles podem ser substituídos por elementos lógicos discretos INE (NAND), ExOR (ExNOR), contadores e multivibradores. Nesse caso, escolher o IC multifuncional 4046 com ajuste de fase automático do oscilador controlado por tensão (VCO) integrado em combinação com o contador/divisor 4060 é uma boa solução, mas existem outras opções. Se o instrumento for alimentado por baterias, a substituição de TTL por CIs lógicos CMOS reduz bastante a carga e os requisitos de energia CC.
(Neste artigo, outro microcircuito multifuncional foi apresentado anteriormente, mostrado no segmento anterior (Fig. 2), com base no qual SOMENTE a versão mais simples do dispositivo para detecção de anomalias magnéticas "LISTEN" (BY HEAR) pode ser implementada. Tal solução técnica não requer medição de frequência [precessão de prótons]; ela usa apenas um temporizador para ligar e desligar periodicamente a corrente das bobinas do sensor para polarização periódica [de prótons]).
Observação. tradução Apesar de sua simplicidade, este dispositivo é bastante eficiente. Em termos de profundidade e raio de detecção de anomalias magnéticas criadas no solo e reservatórios por metais ferrosos, sobrepõe-se significativamente à maioria dos detectores de metais de outras classes e tipos. (A sensibilidade indicada só pode ser obtida conectando-se ao dispositivo um sensor com duas bobinas quase idênticas conectadas em direções opostas).
Em um dispositivo com PLL (Fig.15,16) a sincronização do pulso de corrente através das bobinas, bem como todos os processos subsequentes de medição de frequência [despolarização do próton] é realizada usando um ressonador de quartzo. Pequenos dispositivos cilíndricos semelhantes podem ser encontrados em alguns relógios de pulso digitais. Eles são vendidos por aproximadamente US $ 1 por 2 peças. em Active Electronics ou $ 1 por item. na Rádio Cabana.
Um ressonador de quartzo mestre é um acessório indispensável para um par de MSs CD4060/MC14060. Juntamente com um ressonador de quartzo de relógio, eles geram uma frequência de 32768 Hz, que é observada na entrada de um contador/divisor de quatorze bits. A frequência final de saída do contador/divisor é de 2 Hz, que corresponde à taxa de repetição do pulso após 0,5 segundos. Para controlar o dispositivo, esta frequência é enviada para 4 contadores binários, dos quais o último controla os elementos lógicos integrais: quatro segundos - uma unidade lógica / quatro segundos - um zero lógico. Um ciclo de contagem completo de 4 contadores binários é usado para simplificação. Se você pretende construir uma versão portátil do magnetômetro, pode ser útil reduzir o intervalo de despolarização (escuta) para meio segundo. Para fazer isso, é necessário complementar o circuito com pelo menos mais um dos quatro elementos lógicos NAND para decodificar os pulsos de entrada (10 ciclos) e restaurar a contagem.
A corrente de polarização é aplicada às bobinas de detecção por alguns segundos para obter uma boa amplitude do sinal da portadora. Normalmente [para a polarização de prótons] três segundos são suficientes. O relé de comutação, após desconectar a bobina da fonte de corrente de polarização, conecta a(s) bobina(s) à entrada do amplificador de áudio. Após a amplificação, o sinal vai para o contador. Se a contagem ocorrer na frequência de relaxamento, é necessário um intervalo de contagem adicional para obter a precisão da medição de frequência com uma resolução de 1 Hz e dez segundos para obter uma resolução de 0,1 Hz. Sem dúvida, neste último caso, o sinal tem tempo para diminuir até o nível de ruído do amplificador. Portanto, em um projeto de circuito de quintal típico (Fig. 2), o sinal de relaxamento após um segundo já compete com ruído e interferência.

Fig.16 Diagrama esquemático de um magnetômetro com um gerador adicional e um PLL
Bloqueio de fase de malha fechada [que é implementado no CD(HEF)40406 MS, bem como no 74AC(ACT)4046, 74HC(HCT)4046, 74HC(HCT)7046, 74HC(HCT)9046, e é usado neste circuito], fornece medição da frequência portadora com alta precisão e resolução de 1 e 0,1 Hz, e em menos de um segundo. Uma entrada do(s) comparador(es) de fase interno [FK1:EXOR e FK2:COMV)] recebe um sinal da saída do amplificador de áudio. A outra entrada do(s) mesmo(s) Comparador(es) de Fase recebe um sinal sintetizado pelo oscilador interno MS ...... 046, controlado por tensão - VCO.
[Nota trans. Na série acima MS.....046, o Comparador de Fase FK1 integrado permite que você compare os sinais de entrada tanto na frequência fundamental quanto nos harmônicos do sinal de entrada, o que é equivalente à multiplicação de N vezes do sinal de entrada. frequência de entrada mesmo sem um divisor externo. O FK2 pode comparar 2 sinais periódicos (pulso) apenas na frequência fundamental. A discretização da contagem de frequência (mais precisamente, o período) do sinal de entrada para obter a resolução limite necessária da medição de frequência f / N é garantida pelo fato de que o valor atual da frequência de geração do VCO embutido para todos as perturbações típicas dentro da regulação são mantidas automaticamente e, na presença de um divisor externo, tem sempre o valor , que é N vezes maior que o valor atual da frequência do sinal de entrada. O tempo de estabilização da frequência de saída do VCO após uma mudança de etapa na frequência ou fase do sinal de entrada é inferior a 1 ms. Normalmente, a comparação das fases dos sinais de entrada e de referência, realizada em um dos Comparadores de Fase integrados: FK1, FK2 ou FK3 (em alguns modelos), ocorre na frequência do sinal de entrada. Portanto, a frequência de saída do VCO é geralmente dividida por um fator N antes de ser alimentada na entrada do comparador.]
Neste circuito, a frequência de saída do VCO atual é dividida sequencialmente por 10 e 8 por dois contadores/divisores digitais externos. Quando o loop externo do MS 4046 é fechado, a frequência VCO é mantida continuamente igual à frequência de saída do amplificador de áudio multiplicada por um fator N igual ao fator de divisão total de todos os divisores externos conectados (8x10 = 80). [Observação Pista: MMP-203 tem N = 64, i.e.
A captação direta do sinal da saída do VCO para os divisores permite obter uma indicação com uma resolução de 0,1 Hz (Verdadeiro para MS CD(HEF)4046. A série MS AC, HC permite obter uma resolução mais alta - veja nota no final do artigo). Naturalmente, uma indicação de quatro dígitos da intensidade do campo magnético pode ultrapassar o quarto dígito de contagem, pois com resolução aumentada, milhares são exibidos no dígito mais alto (4º) e centenas, dezenas, unidades e décimos de Hz, respectivamente, em os próximos dígitos.
[Observação por. Para MS de todas as séries ... 046 O comparador de fase FK2 (e é exclusivamente um!) Possui 2 saídas: uma - inversa - é enviada para um filtro passa-baixas externo, e a outra - direta - é projetada para indicar a momento em que a saída inversa de FK2 está no terceiro estado Z. Somente neste estado de FK2, as frequências de entrada e saída do MS são estritamente sincronizadas com a razão de multiplicação/divisão N, enquanto uma unidade lógica aparece na saída direta de FK2. Esta saída (1ª perna do MS) pode (e deve) ser usada para permitir a exibição de resultados de medição verdadeiros e proibir falsos. Uma solução de circuito semelhante é usada no MMP-203 - o circuito é muito complicado, pelo que é significativamente inferior a qualquer MS ... 046 integrado em termos de resistência a interferências e captadores. No diagrama esquemático da versão demo do dispositivo mostrado aqui, esta função mais importante do microcircuito MC...046 não é usada para simplificar].
Neste design (versão de demonstração simplificada), os estados dos contadores de décadas são exibidos usando LEDs. No diagrama (Fig. 16), quatro LEDs são mostrados em dígitos significativos, [exibindo estados 1, 2, 4, 8], e basta instalar dois ou três LEDs no dígito mais significativo, pois esse dígito é raramente ultrapassado. O usuário pode ler facilmente o equivalente simples de um decodificador binário BCD2 (dois mil ou duzentos, dependendo da resolução selecionada). Normalmente, sob condições de medição estáveis, as alterações ocorrem apenas no dígito menos significativo - na resolução selecionada de 1 Hz, ou nos dois últimos dígitos - na resolução de 0,1 Hz. Se o uso pretendido do instrumento for uma pesquisa portátil, suspeito que uma exibição completa dos dígitos decimais seria altamente desejável para que todas as variações fossem lidas. (Embora ouvir o som da saída de áudio possa ser suficiente para detectar anomalias magnéticas). Existem muitas opções para implementar o display decimal com o qual estamos acostumados: este é... um display LCD composto, um display LCD de sete segmentos, etc. Eles exigem a complementação do circuito com um decodificador BCD adequado para que o decodificador/indicador possa ser segmentado. Um contador/indicador combinado caro também pode ser usado. Para economizar e minimizar o número de condutores de conexão que acompanham os componentes de contagem do circuito, em alguns casos, em vez de contadores discretos, é possível utilizar multivibradores monoestáveis (vibradores simples). Com a ajuda deles, você pode definir os períodos de pulsos fornecidos aos circuitos de coincidência e sincronização. Isso é mais fácil do que decodificar os estados dos contadores CD4060 e 74197 (U1 e U2), que são controlados a partir de pulsos de tempo gerados por um cristal de 32,768 kHz. (Fig.7). Todas as operações de decodificação e controle podem ser implementadas usando elementos lógicos NAND, bem como inversores (especialmente nos casos em que os próprios contadores não fornecem as operações lógicas necessárias nos sinais de saída Qpr e Qinv).
Para garantir os intervalos de tempo especificados, os períodos de pulso nas saídas dos multivibradores devem ser ajustados e estabilizados com um grau de precisão suficiente, no entanto, a tolerância dos valores nominais dos elementos de temporização externos do multivibrador é frequentemente insuficiente para garantir intervalos de tempo precisos (atrasos). No esquema acima, a formação de intervalos de tempo precisos é realizada usando estabilização de frequência de quartzo e um contador de vários dígitos. Os resistores de temporização R3 e R4 são calculados corretamente e, na prática, devem ser ajustados para fornecer os atrasos de tempo necessários (intervalos de tempo), [ porque a tolerância para capacitores de 10mF é muito ampla! Observação. por.].

Arroz. 7. Diagramas de temporização para a formação de pulsos de controle. CONFIGURANDO OS TIME DELAYS (TIME INTERVALS) O quarto bit oscilador/saída oposta do CD4060 (Q4) está disponível no MC U1, pino 7. Neste ponto, a frequência do oscilador de cristal (32768 Hz) é dividida por 16, e é igual a 2048Hz. Configuração de atraso do multivibrador U3A
Crie os seguintes links temporários:
1. Quebre a ligação entre os pontos A1 e A2. Conecte A2 a um sinal de teste com uma frequência de 2048. Esta é a saída MC de U1, pino #7.
2. Quebre a conexão entre os pontos TC1 e TC2. Aqui passa o sinal de reset (RESET TO ZERO) das décadas de todos os contadores, formados e atrasados pelo multivibrador U3A.
Defina o valor do resistor variável R12 no pino 11 de U10 para cerca de 8000 ohms. Assim, a frequência central do CD4046 VCO é pré-ajustada para verificar se está dentro da largura de banda de captura do loop de feedback para o sinal de teste. Quando a frequência é captada pelo VCO, ela deve ser 80 vezes maior que a frequência do sinal de teste, ou seja, igual a 163840Hz. Coloque o interruptor de habilitação (S1) em "1 Hz". Neste caso, a saída do divisor de frequência decimal do VCO MS 16384 (MS 74196 é indicado no diagrama!) é conectada à entrada do contador de dez dias da ordem mais alta. Defina o valor nominal do resistor de temporização R3 para 56 kOhms ou 62 kOhms.
A indicação deve ser atualizada a cada oito segundos. A duração estimada do ciclo de exibição é de 0,2 segundos, portanto, com uma frequência VCO de 163840 Hz, será exibido como o número 3277. (0,2 X 16384 = 3277). Selecione um valor para o resistor R3 de modo que o tempo de atraso U3A fique na faixa de 190 a 210 milissegundos, enquanto o contador deve ler entre 3112 e 3440.
Configuração de atraso do multivibrador U3B:
Deixe todas as conexões de teste antigas. Além disso, crie os seguintes links de teste temporários:
1. Quebre a conexão entre os pontos D1 e D2.
2. Quebre a conexão entre os pontos B1 e B2. Em B1, conecte um jumper de fio isolado para que você possa conectá-lo manualmente ao terra para redefinir a reinicialização da década.
3. Crie um link temporário do ponto E1 ao D1. Reinicialize manualmente o medidor aterrando B1. Observe o contador, que deve contar antes e depois de redefinir manualmente o contador. Para R4, defina o valor inicial para 27 kOhms. Ajuste o valor de R4 para que o tempo de atraso fique entre 90 e 100 milissegundos, o que equivale a uma leitura do contador entre 1475 e 1638. Restaure todas as conexões de acordo com o diagrama de circuitos do dispositivo. CD4046 MC VCO AJUSTE:
Conecte temporariamente o ponto A2 ao solo. Ajuste o valor da resistência R12 para que as leituras do indicador fiquem dentro da faixa de 2230 - 2250. Remova o aterramento temporário.
[Observação por. A substituição do CD4046 pelo MC 74HC(NST)7046-9046 permite obter uma indicação da frequência de precessão de relaxamento do próton com resolução 1; 0,1; 0,01 e 0,001 Hz!. (Veja acima: De acordo com o circuito VCO, o CD4046, juntamente com os divisores por 10 e 8, gera um sinal de teste de 163840 Hz. Para o CD4046 VCO, a frequência limite é de 1-2 MHz. Se em vez de CD4046 tomarmos 74HC (HCT) 70 (90) 46, e adicionar à cadeia OS mais um divisor decimal (10 * 10 * 8), então o VCO irá gerar constantemente uma frequência central uma ordem de magnitude maior, ou seja, 1638400 Hz. Se necessário, você pode aumentar a frequência do VCO em outra ordem, e então obtemos uma resolução de 0,001 Hz! Para a nova série MC 74NS...046, a frequência operacional superior é aumentada para 16-18 MHz, para novos decodificadores CMOS de a série 74NS, a frequência de contagem é aumentada para 50-80 MHz).]
Com uv. Beletsky A.I. 10.2008 Kuban Krasnodar.